Now we turn from relative motion in one dimension to relative motion in two (and, by extension, three) dimensions. In Fig. 4-21, our two observers are again watching a moving particle P from the origins of reference frames A and B, while B moves at a constant velocity ![]() relative to A. (The corresponding axes of these two frames remain parallel.)
relative to A. (The corresponding axes of these two frames remain parallel.)
Figure 4-21 shows a certain instant during the motion. At that instant, the position vector of the origin of B relative to the origin of A is ![]() . Also, the position vectors of particle P are
. Also, the position vectors of particle P are ![]() relative to the origin of A and
relative to the origin of A and ![]() relative to the origin of B. From the arrangement of heads and tails of those three position vectors, we can relate the vectors with
relative to the origin of B. From the arrangement of heads and tails of those three position vectors, we can relate the vectors with

By taking the time derivative of this equation, we can relate the velocities ![]() and
and ![]() of particle P relative to our observers:
of particle P relative to our observers:

By taking the time derivative of this relation, we can relate the accelerations ![]() and
and ![]() of the particle P relative to our observers. However, note that because
of the particle P relative to our observers. However, note that because ![]() is constant, its time derivative is zero. Thus, we get
is constant, its time derivative is zero. Thus, we get

As for one-dimensional motion, we have the following rule: Observers on different frames of reference that move at constant velocity relative to each other will measure the same acceleration for a moving particle.
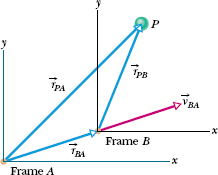
Fig. 4-21 Frame B has the constant two-dimensional velocity ![]() relative to frame A. The position vector of B relative to A is
relative to frame A. The position vector of B relative to A is ![]() . The position vectors of particle P are
. The position vectors of particle P are ![]() relative to A and
relative to A and ![]() relative to B.
relative to B.
In Fig. 4-22a, a plane moves due east while the pilot points the plane somewhat south of east, toward a steady wind that blows to the northeast. The plane has velocity  PW relative to the wind, with an airspeed (speed relative to the wind) of 215 km/h, directed at angle θ south of east. The wind has velocity WG relative to the ground, with a speed of 65.0 km/h, directed 20.0° east of north. What is the magnitude of the velocity PG of the plane relative to the ground, and what is θ?
PW relative to the wind, with an airspeed (speed relative to the wind) of 215 km/h, directed at angle θ south of east. The wind has velocity WG relative to the ground, with a speed of 65.0 km/h, directed 20.0° east of north. What is the magnitude of the velocity PG of the plane relative to the ground, and what is θ?
Solution: The Key Idea is that the situation is like the one in Fig. 4-21. Here the moving particle P is the plane, frame A is attached to the ground (call it G), and frame B is “attached” to the wind (call it W). We need to construct a vector diagram like that in Fig. 4-21 but this time using the three velocity vectors.
First construct a sentence that relates the three vectors:

This relation can be drawn as in Fig. 4-22b and written in vector notation as

We want the magnitude of the first vector and the direction of the second vector. With unknowns in two vectors, we cannot solve Eq. 4-46 directly on a vector-capable calculator. Instead, we need to resolve the vectors into components on the coordinate system of Fig. 4-22b and then solve Eq. 4-46 axis by axis (see Section 3-6). For the y components, we find

Solving for θ gives us

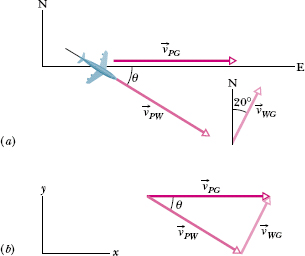
Fig. 4-22 To travel due east, the plane must head somewhat into the wind.
Similarly, for the x components we find

Here, because PG is parallel to the x axis, the component vPG,x is equal to the magnitude vPG. Substituting this notation and the value θ = 16.5°, we find

![]() CHECKPOINT 8 Suppose the pilot turns the plane to point it due east without changing the airspeed. Do the following magnitudes increase, decrease, or remain the same: (a) vPG,y, (b) vPG,x, (c) vPG? (You can answer with-out computation.)
CHECKPOINT 8 Suppose the pilot turns the plane to point it due east without changing the airspeed. Do the following magnitudes increase, decrease, or remain the same: (a) vPG,y, (b) vPG,x, (c) vPG? (You can answer with-out computation.)
Leave a Reply